Регистрация данных наземного лазерного сканирования
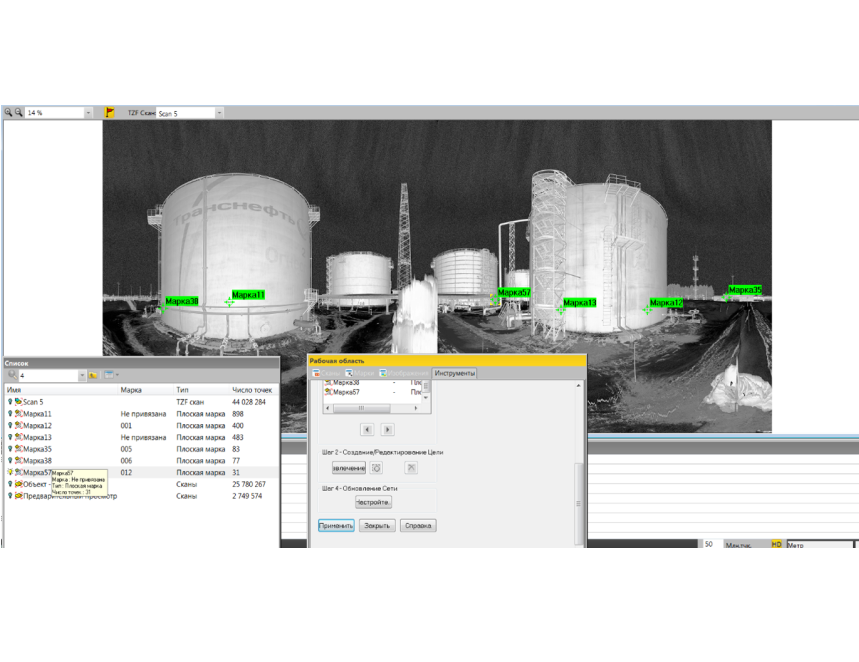



На каждой станции сканер является сканер является центром системы координат. Первоочередная камеральная задача, получение целостного облака точек. Решается данная задача в процессе регистрации сканов, так называемой сшивки сканов, метод распознавания и объединения марок с соседних станций. Определим следующие понятия.
Скан — данные лазерного сканирования с каждой станции установки сканера
Регистрация данных (сшивка) – процесс объединения сканов с соседних станций в единой облако точек объекта.
Марка – опорная характерная точка, знак или предмет.
Существуют следующие методы регистрации данных:
- По маркам;
- По общим характерным точкам;
- Авто-регистрация данных – программный метод (по плоскостям);
- Авто-регистрация данных – инерциальные системы сканера.
Рассмотрим базовый принцип регистрации данных:

где X,Y,Z – координаты точки объекта в системе координат объекта; X’Y’Z’ — координаты точки объекта в системе координат сканера; X0, Y0, Z0 – координаты начала системы координат сканера; A – матрица поворота, зависящая от трех углов ω α κ.
Неизвестные элементы внешнего ориентирования сканера X0, Y0, Z0, ω α κ можно определить по маркам. Минимальное число опорных точек равно 2, однако в этом случае может возникнуть неопределенность в определении угловых элементов. Поэтому минимальным числом опорных точек следует считать 3, не лежащих на одной прямой. Естественно, лучше иметь больше опорных точек, разнесенных по площади.
Преобразование делается для каждого скана.
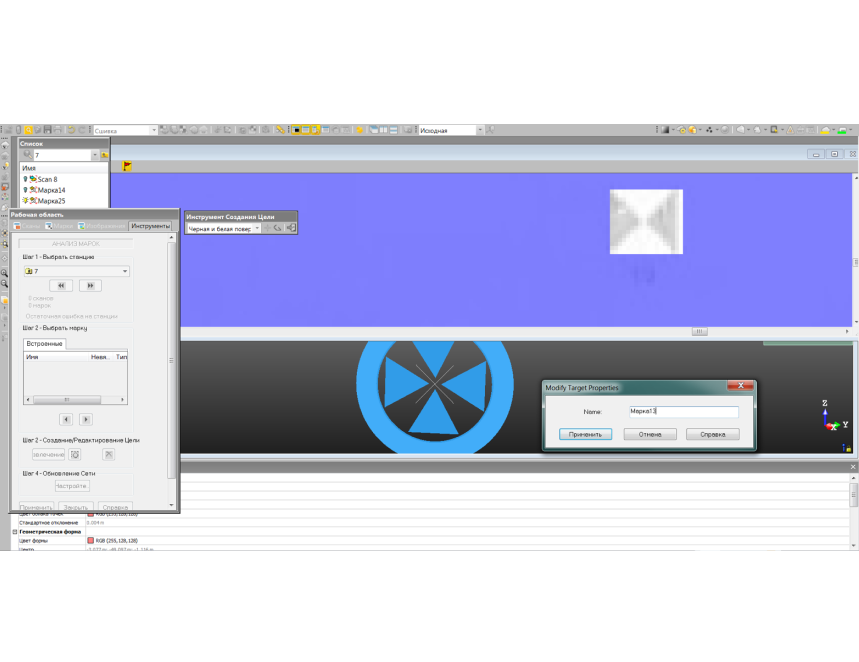
Рассмотрим виды марок, применяемых при наземном лазерном сканировании:
- Черно-белые бумажные плоские марки;
- Белые сферические марки;
- Поворотные марки;
- Специальные марки.
Специальные марки служат для автоматического распознавания в специальном софте. Но бумажные и сферические марки также отлично распознаются в автоматическом режиме. Этот нюанс больше относится к софту для обработки данных.